「AWS IoT ボタン」を用いずにインターネット経由でスマホによるラジコン操作
完成 (6日目)
6ページ目 (全 6 ページ)

- 任意の言語で Raspberry Pi デジタル入出力、アナログ出力 (PWM)
- Raspberry Pi で I2C を利用するための設定
- Raspberry Pi アナログ入力 (I2C A/D コンバータ)
- PayPal エクスプレスチェックアウト (API 決済) の使い方
- Raspberry Pi パッケージ管理コマンド (NOOBS)
- Arduino で作る 7 セグメント LED タイマー
- Arduino で作る温度と気圧の計測基板
- 部屋の温度をツイートする Arduino (外出先から制御)
- 手を振りかざすと白旗を上げて降参する Arduino
- 虚仮威しの防犯装置 (Arduino)
注目の記事





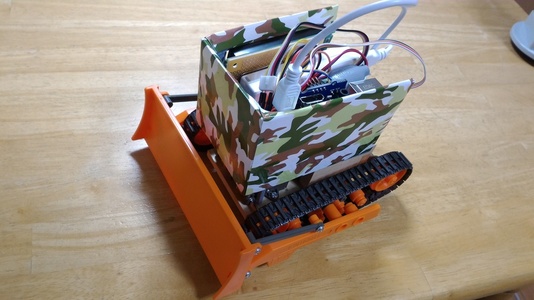
ボックスの中にモジュールを設置する
個別に動作検証してきたモジュールを、ボックスの中に設置します。
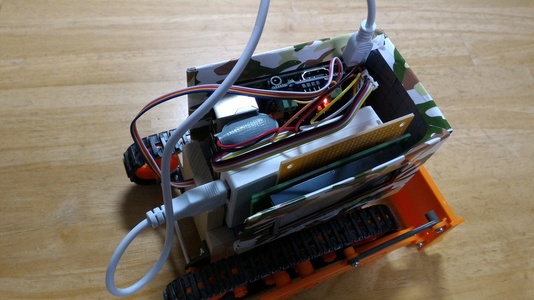
別の角度から
ふたを閉じて完成です。

Raspberry Pi 起動時の設定
好みに応じて rc.local に nohup を用いたコマンドを登録すれば Raspberry Pi 起動時に自動で WebSocket 通信が開始できます。または tmux を用いて、ターミナルを終了してもプログラムの実行が継続されるようにしておきます。
$ tmux new
$ ruby bulldozer.rb ←実行後にターミナルを閉じる

さいごに
本作品は、電子工作と Web の世界を組み合わせたロボットを作ってみたいと思っていた学生の頃からの私のちょっとした夢を実現させたようなものです。少し前までは H8 や SH マイコンを C/C++ で扱うしかなかったことを考えると、ruby で簡単にプログラミングできてしまったことはちょっとした驚きでした。また何か思いついたら作ってみたいと思います。
余談
制作途中で一度、ピン番号を間違えて挿してしまいラズパイを壊しました。数年ぶりの買い換えでした。最新の Raspberry Pi には無線モジュールが搭載されていて便利ですね。
